إن القرميد اللين الذي يلتصق ببعضه البعض مثل قطع الليغو قد تكون الحل الأقصى من اجل صناعة الروبوتات المتقدمة.
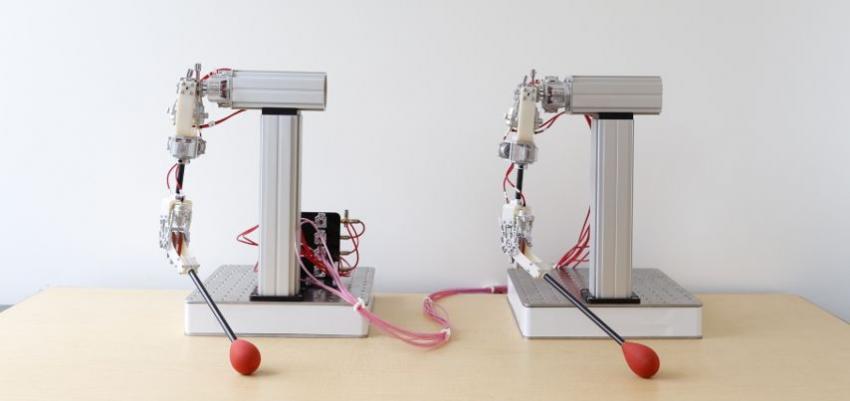
قام George Whitesides وزملائه في جامعة Harvard بتطوير طيف من الروبوتات اللينة ابتداءً من الحبّار الراقص ” limbo-dancing squid ” إلى المخالب القابلة للطي ” bendy tentacles ” اعتماداً على البلاستك اللين وتعمل على طاقة الهواء.
وجميع هذه الروبوتات كانت يجب ان تكون مصنوعة من قالب خاص، عند ذلك أدرك الفريق بانهم يمكن ان يكونوا أكثر ابداعاً اذا استخدموا قرميد البناء.
بالنظر إلى قطع الليغو للإلهام، استخدم الفريق طابعة ثلاثية الأبعاد لصناعة قالب لمسمار من القرميد بأبعاد 9×6 وملؤوه بالبلاستك اللين.
ان هذه المادة ناعمة، استخدموا الشفرة لتقطيع القرميد لأحجام مختلفة. اسموا اختراعهن بـ لدائن القرميد اللينة المتناسبة بنقرة ( Click-Fit Elastomeric Bricks ) واختصاراً ” Click-e-bricks ” لأنه عندما تنقر الازار الموجودة على سطحها تتجوف إلى قاعدة القرميد.
استخدم الفريق هذا الاختراع لبناء الهياكل الأساسية ومن ثم تفكيكها، وبعكس قطع الليغو فإن مرونة القرميد سمح ان يتم تصنيع أسطوانات وأقواس وحتى شريط موبيوس. كما قاموا بصناعة روبوتات لينة قادرة على الانحناء والتدحرج على الأرض عندما تملء بالهواء، وإن الفراغات الموجودة في المادة يتم اغلاقها بالصمغ لكيلا تفكك بعد ذلك.
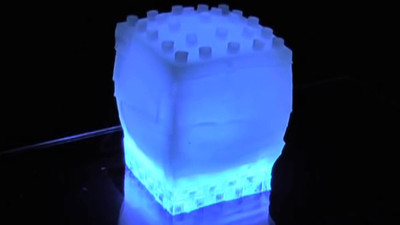
إن وضع مواد أخرى داخل القرميد حدّث الفكرة ونقلها إلى مرحلة أبعد، حيث قاموا بتكديس هذه القراميد التي تحتوي على قنوات ميكروية تمر فيها السوائل لإرسالها في اتجاهات مختلف، وصنعوا ضوء مؤقت من القرميد الحاوي على بطارية وضوء ليد Led.
في نهاية المطاف، يتمنى الفريق ان تستطيع الروبوتات اللينة ان تتلاعب بالقرميد بذاتها مؤدية إلى الحصول على روبوتات ذاتية التكرار التي تستطيع تبديل القطع بذاتها حسب الحاجة.