


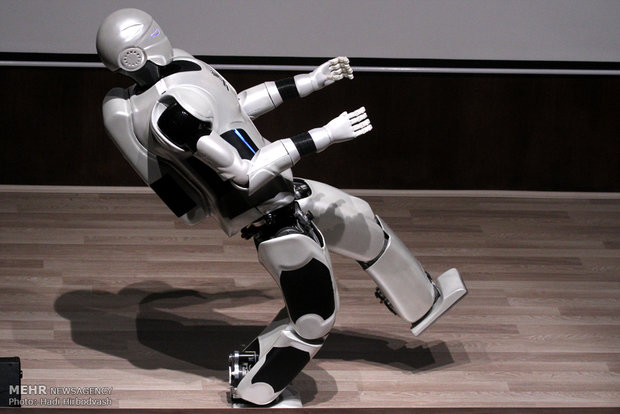
قام مجموعة من الباحثين في جامعة طهران بالكشف عن آخر الأجيال الخاصة بالأنظمة الروبوتية المحاكية للبشر (المعروفة بـ Humanoid)، والذي تم تسميته “سورينا 3”. خلال عملية العرض، ظهر الروبوت وهو يمشي مقلداً حركات اليدين للبشر، كما قام بالوقوف على قدمٍ واحدة بينما كان يعود بجذعه للوراء.
يقول أغيل يوسفي-كوما، وهو بروفيسور في هندسة الميكانيك وقائد مشروع الروبوت سورينا، يقول في حديثٍ لـ IEEE Spectrum أن نظام سورينا عبارة عن مشروع بحثي يهدف للبحث في عملية التموضع والحركة على القدمين Bipedal Locomotion، كما يهدف للبحث أكثر في عملية التفاعل بين الروبوت والبشر، وتحديات أخرى تتعلق بتطوير الأنظمة الروبوتية الذكية. يأمل أيضاً البروفيسور يوسفي-كوما أن يساهم الروبوت “سورينا” بإظهار أهمية المهن والوظائف الهندسية للطلاب وكذلك للمجتمع، حيث يرى البروفيسور أن الروبوت عبارة عن نموذج للتطور التقني باتجاه السلام والإنسانية.
تم صنع غلاف خارجي للروبوت “سورينا 3” من البلاستيك الأملس، كما تزويده بأعين مكون من الثنائيات المصدرة للضوء LED، ويبلغ طوله 1.9 متر كما يزن 98 كيلو غرام. تم تزويد الروبوت سوينا بنظام حساسات متكامل، والذي يتضمن نظام إبصار ثلاثي الأبعاد يعتمد على الكينيكت Kinect، وتم تزويد مفاصل الحركة فيه بـ 31 محرك من نمط سيرفو. يتم التحكم بالروبوت عبر نظامٍ برمجي مقاد من قبل الإنسان، وهو يعتمد على أنظمة تشغيل الروبوتات ROS: Robot Operating System.
الفيديو التالي يظهر الروبوت “سورينا 3” وهو يقوم بتأدية بعض المهارات الحركية التي يتمتع بها:
مقارنةً مع الأنظمة الروبوتية المحاكية للبشر المتقدمة، فإن نظام سورينا يمتلك بعض القيود والسلبيات. لو أخذنا على سبيل المثال روبوت “أسيمو Asimo” المُطوّر من قبل شركة هوندا اليابانية، فإن روبوت “أسيمو” قادر على تأدية حركات الركض، والقفز على رجل واحدة ومحاكاة حركات الرقص، فضلاً عن الانسيابية التي يتمتع بها الروبوت “أسيمو” أثناء تأديته للحركات الميكانيكية المختلفة. بعض النماذج المتقدمة أيضاً تستطيع أن تقوم بمهامٍ أكثر تعقيداً مثل قيادة المركبات، والحركة فوق كتل من الطوب.
في الوقت الحالي، لا يمتلك الروبوت سورينا القدرة الكاملة على تأدية الحركات المعقدة ببراعةٍ تامة، ولكن بالنظر إلى مدى التقدم الذي حققه المشروع منذ بدايته في عام 2008، يمكن القول أن الباحثين في جامعة طهران قد حققوا تقدماً كبيراً بهذا المجال. النموذج الأول الذي تم إطلاقه في عام 2008 كان يمتلك 8 درجات حرية فقط. النموذج “سورينا 2” الذي تم إطلاقه في عام 2010 كان يمتلك 22 درجة حرية، ويستطيع الحركة بمعدل سرعة قدره 0.03 متر/ثانية. الآن، النموذج الثالث وهو “سورينا 3” يمتلك 31 درجة حرية ويستطيع الحركة بمعدل سرعة أكبر بـ 10 مرات من النموذج السابق، حيث يبلغ معدل سرعة الحركة الخاص به 0.2 متر/ثانية.
يقول البرفيسور يوسفي-كوما أن أحد أهم ميزات الروبوت “سورينا” هو إمكانية استغلاله بشكلٍ كبير في حالات الحوادث والكوارث، فالروبوت يمتلك حالياً القدرة على صعود ونزول الأدراج، الإمساك بالأشياء، القدرة على المشي على الأرض بوجود عقبات حركة، وحتى ركل كرة قدم.
من أجل بناء الروبوت “سورينا 3″، قام الباحثون في جامعة طهران بإجراء تحديثاتٍ كبيرة على النموذج السابق، حيث قاموا بتحديث الحساسات وأجزاء التشغيل الميكانيكي التابعة للروبوت. يمتلك النظام الجديد أيضاً نظاماً بصرياً حديثاً قادر على إجراء عملية كشف الوجوه Face Detection وتعقب حركة الإنسان. يمتلك الروبوت أيضاً نظام تعرف على الكلام Speech Recognition والذي يمكنه من التعرف والاستجابة للعديد من الجمل باللغة الفارسية. قام الفريق أيضاً بتحديث نظام تشغيل الروبوت ليصبح قادراً على الاستجابة بشكلٍ فوريّ للبيئة المحيطة به، والتحكم بردات فعله، وحتى الكشف عن الأخطاء غير المرغوبة في النظام.
يتكون الفريق البحثي المساهم في مشروع تطوير الروبوت “سورينا 3” من حوالي 70 شخص، وهم عبارة عن دكاترة جامعيين، مهندسين وطلاب من جامعة طهران، ومن خمس معاهد تقنية أخرى في إيران، بالإضافة لمساهمة بعض الشركات المحلية في إيران والمختصة بمجال تطوير برمجيات الأنظمة الروبوتية. يتوقع البروفيسور يوسفي-كوما أن يساهم مشروع تطوير “سورينا 3” بإحراز تقدمٍ تقنيّ بمجال الأنظمة الروبوتية المحاكية للبشر، خصوصاً في تطبيقات مثل العمليات الصناعية والإنتاجية، ومجال الرعاية الصحية.
يركز حالياً الفريق على تطوير إمكانيات الروبوت من حيث تفاعله مع البشر، وهم يخططون لجعله ذو قدراتٍ آلية أكثر، بمعنى التخفيف من الإشراف البشري المباشر على تصرف وحركات الروبوت وتفاعله مع البيئة المحيطة به. يقوم الفريق أيضاً بالتحضير لنشر عدة ورقات بحثية حول المشروع الحالي، كما أنهم قد شارفو بعملية التخطيط لنموذج “سورينا 4”.
المصدر: IEEE Spectrum
للمزيد من المقالات والأخبار المتعلقة بالأنظمة الروبوتية:
تشارلي: إبداع طالب في جامعة دمشق انتهى ببناء روبوت يتحدى الإنسان في الشطرنج!
الروبوتات الذكية كنماذج لدراسة التواصل البشري
جيبو: أول روبوت للعائلة تم تطويره في معهد MIT
البشر والآلة على طاولةٍ واحدة: مباراة كرة طاولة بين البشر والروبوت





الغرب يصنع ونحن نستهلك ونقول سبحان الله
مقال شيق
لقد اصبحت ايران تنافس الغرب في ميدان التكنولوجيا
هذه عادات الغرب ونحن كعرب مستهلكون فقط
شكراً لك برغم طول المقالة إلا اني استمتعت بقرأتها وانا من متابعي موقعكم باستمرار اتمنى لو في قائمة بريدية ان تخبرني لاشترك فيها
خالص الود والاحترام
لكم كنا نتمنى بأن يكون هناك دور للعرب فى مثل هذا التطور
انشاءالله يجي يوم للعرب ونشوفهم أحسن من هيك